安装SDK
按照以下顺序安装所有软件即可: 1. ARIA:接口控制库,包含了通信接口库(ArNetworking); 2. BaseArnl:ARNL库的基础SDK必须先于ARNL安装。 3. ARNL:高精度室内激光定位库; 4. Mapper3:地图绘制软件; 5. MobileEyes:远程界面GUI; 6. MobileSim:机器人仿真软件; 7. SONARNL:室内声纳定位库。
设置ARIA和ARNL环境变量
路径:计算机图标上右键>>属性>>高级系统设置>>环境变量
在系统变量里面里面添加如下两项: 1. 变量:ARIA_DIR,值:ARIA安装路径 2. 变量:ARNL_DIR,值:ARNL安装路径
在系统变量的Path中附加以下两项内容: 1. %ARIA_DIR%; 2. %ARNL_DIR%;
配置vs2013属性表
先在vs2013中新建一个Win32控制台应用程序再继续下面的步骤。
每一个vs项目都有自己的属性表,属性表中保存了IDE编译项目需要知道的所有信息。每一个应用都至少有两种编译模式,Release和Debug模式。Debug模式包含许多调试信息,所以使用Debug模式编译的代码可以很容易的查找bug。相反,Release模式是优化过的版本,其目标是让应用尽可能快和尽可能小。所以这两个模式需要使用不同的属性表,需要在属性管理器中分别配置,属性管理器可以在视图菜单中打开。
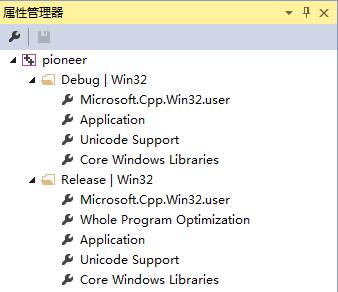
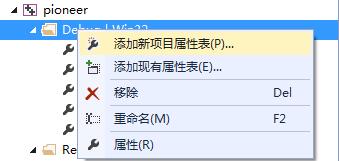
分别为每个模式添加一个新的属性表,添加所有信息到这个属性表中。这样做的好处是显然的,我们可以重复使用该属性表而不需要每一个项目都去配置。
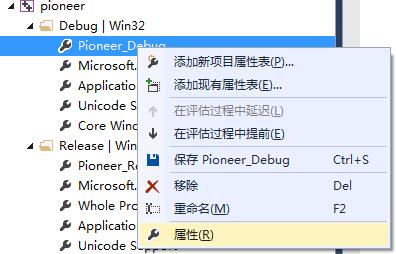
接下来是配置属性表的过程。选择属性表然后右键>>属性。
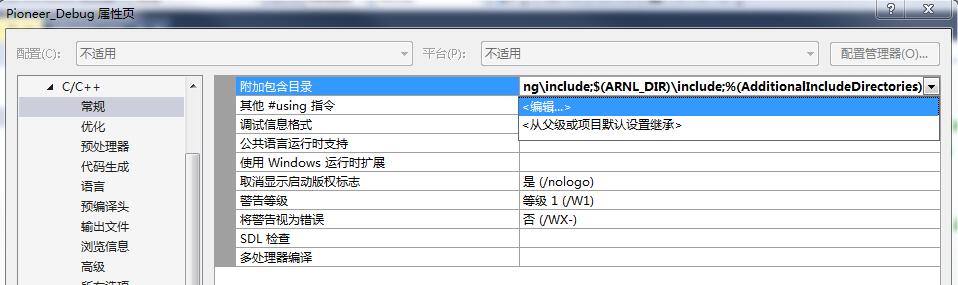
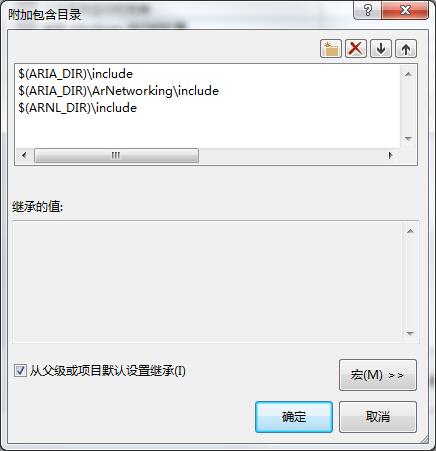
定位到C/C++>>常规,在附加包含目录中添加头文件路径。 1
2
3$(ARIA_DIR)\include
$(ARIA_DIR)\ArNetworking\include
$(ARNL_DIR)\include
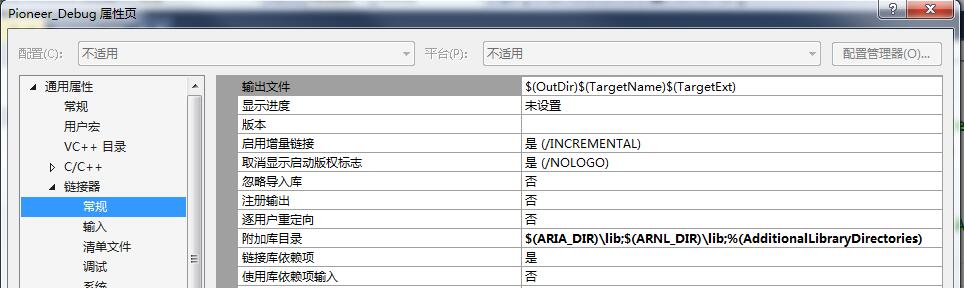
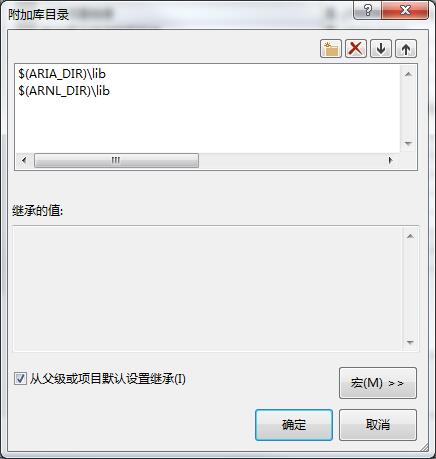
定位到连接器>>常规,在附加库目录中添加lib文件路径。
1 | $(ARIA_DIR)\lib |
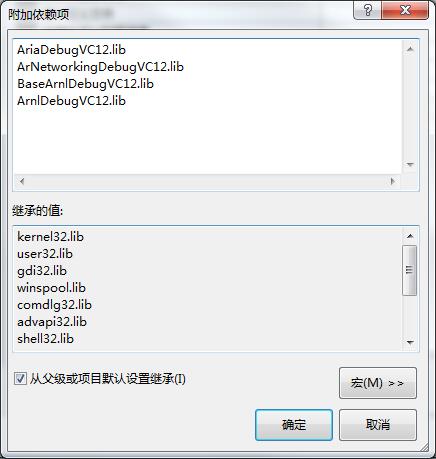
定位到连接器>>输入,在附加依赖项中添加依赖的lib文件,注意这里Debug模式和Release模式的区别。
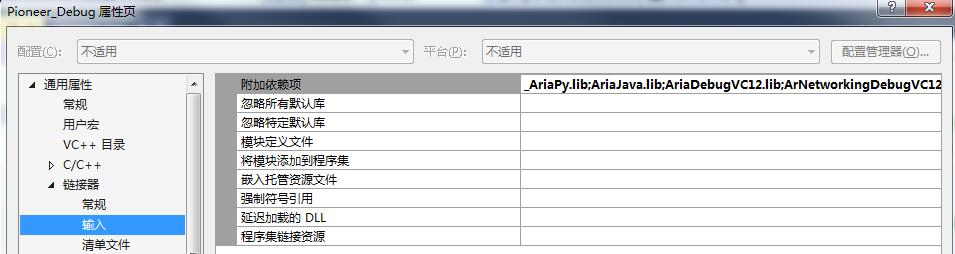
Debug模式: 1
2
3
4AriaDebugVC12.lib
ArNetworkingDebugVC12.lib
ArnlDebugVC12.lib
BaseArnlDebugVC12.lib
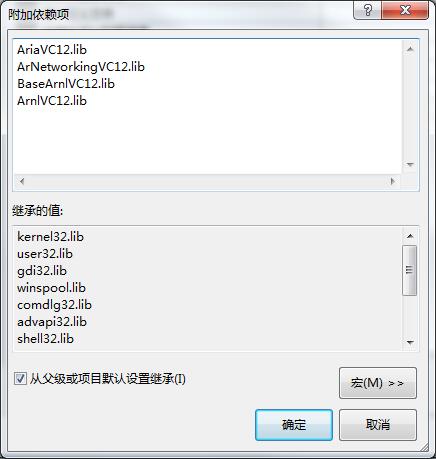
Release模式: 1
2
3
4AriaVC12.lib
ArNetworkingVC12.lib
BaseArnlVC12.lib
ArnlVC12.lib
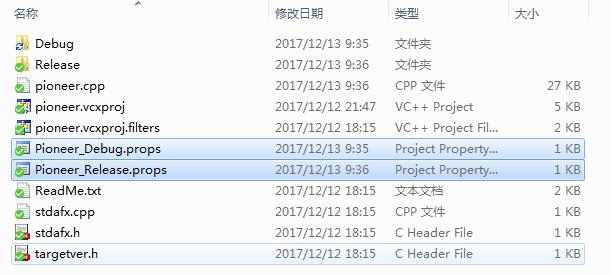
重用属性表
刚才配置好的属性表在项目路径中,可以将其备份出来备用。
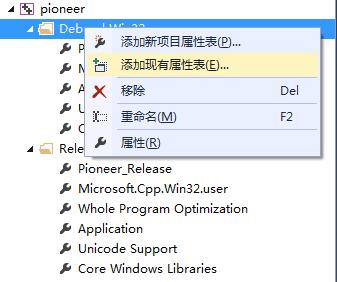
当以后新建项目的时候无需重新配置,只需要将现有属性表添加到项目中即可。
大功告成,拷贝一个样例进去测试一下吧!